
Paratroopers were issued angle head or ‘crookneck’-type flashlights like they are still in use in today’s military. This article is updated regularly with photos that people send me of more interesting variations.

British paratroopers with American TL-122 flashlight
TL-122
The TL-122, without any suffix, was the very first such angle head model. At least, that’s what I would think, because it was completely made of brass and apart from its general appearance quite different in some details to its successor, the TL-122-A and all following types. Tony Rudenko sent me pictures of 2 variations of the TL-122-A that I hadn’t seen before:
On the right, you see a TL-122 (no suffix) type number which is stamped into the housing. The number is not set in a circle, as is usually the case. This version has metal wedged around the lense so there is no way to replace it with a new one. The lense ring with its ribbed rim is unlike the two other types in my article about the TL-122s.
Another difference that really stands out is the belt clip. It is attached to the back with three rivets, but it also extends to the top, where it is also riveted with two more rivets.
It takes a regular threaded bulb “Number 14” (unlike the other TL-122s using PR9 bulb).
On the left is one that looks like a TL-122-A, but is marked No. 709. Never heard of this type designation before. But other than that this flashlight looks like a regular TL-122-A. It is painted OD green and the the brand is Niagara, which was one of the military contractors. I also have a later plastic TL-122-D made by Niagara.The only thing besides the type no. that differs from other TL-122s is the switch.



In April 2008, someone asked me what the “TL” stands for. A very pertinent question. I don’t know for fact, but “Torch Light” sounds logical. If you look at all the nomenclatures in the quartermaster supply catalog, they are mostly abbreviations (“BG” for Bag, for instance). I know about the TL-29 knife, but this appears in the catalog as part of the TE-33 kit, which also includes the TL-13-A pliers. In this case, TL stands for “Tool Linesman”. But in the same catalog I also found a “Flashlight TL-194 (single cell, waterproof, jungle type)”, so it looks like the TL-designation was used for more than 1 type of flashlight. So I think we can rule out that TL stands for “Tool Linesman” in the case of flashlights, since the TL-194 defenitely is no tool for linesmen, but it IS a flashlight (or torch light).
But then in June 2014, R Bryan sent me his view that I think is a more likely explanation: He disagrees with the “torch light” nomenclature. Few people in the U.S. call a flashlight “a torch”. War Dept Tech Bulletin “SIG 120” dated 14 Nov 1944, refers to flashlight TL-122, plus flashlight models A through D, but does not once call it a torch. It consistently uses “flashlight”. With the flash button on the switch, flashlights could be used for signalling in addition to general lighting. As such, they likely received a tool designation like other tools used by the Signal Corps. Of course other groups used them too, but they likely began original issue as signal equipment.
TL-122-A
The Eveready civilian “military type” #2257 was the same model as the TL-122-A. It only became the TL-122-A after WWII started. The TL-122-A body and the battery cover were first made of brass, then steel. Later models were made of green plastic. It was painted OD green, with the lense ring and the battery cover painted black, making it easy to recognise on wartime black and white photographs. The battery cover did not house a spare bulb, like later types, but it had a large O-ring at the bottom. Its construction was quite weak. The connection between the battery housing and the angle head will easily twist off. The TL-122-A was the smallest of all types and was the only one that would fit the flashlight mounting brackets in military vehicles. This early model is now quite rare and much sought after, so it’s the most expensive of all TL-122s.
The TL-122-A can be seen on photographs from the entire war, but especially the early years. You can see many on pictures from the preparations of the D-Day airborne landings, even though the TL-122-C already existed at the time. There is photographic evidence of the TL-122-A used by British paratroopers as well.
There are several manufacturers of the A. Some small differences exist between manufacturers, but even between flashlights of the same make.
There were three different types of lense rings: a round type with smooth sides (most commonly found), a round one with ribbed sides, and a more squarish type which was probably meant to make it easier to unscrew. The TL-122-A used a glass lense, which was prone to breaking quite easily, so the lense ring had to be removed to replace the lense. As far as I have been able to determine, the ones with a round lense ring all have the switch set in a circular recess.



I also know of three different types of switches. The one one the left in the picture below seems to be the least common, the two others about equally rare, but all three are hard to find, especially in good condition. Most of the ones I have seen are missing a lot of paint and have broken lenses. It’s hard to guess which type or make is the oldest or the ‘original’.
Below, at the right, are also photographs of a TL-122-A with what appears to be a black bakelite battery cover and one that got an awful paint job. Don’t repaint yours, the loss of paint is normal and your paint is never going to look the same.






The TL-122-A also came in several different designs of battery caps, depending on the manufacturer. The one on the left is marked ‘Eveready Trade-Mark’, and ‘Made in U.S.A. A National Carbon Company Product’. This is the most commonly encountered make. The one next to it is marked ‘Refill with Usalite batteries’, the ‘Usalite’ logo, and ‘Made in the U.S.A. U.S. Electric Mfg. Corp.’ The one on the right is just marked ‘Niagara’. TL-122-A’s from Usalite and Niagara are quite rare (both companies also made the later plastic models).




Another variation of the markings of the battery cap of a Usalite TL-122-A was sent to me by Ken C. See picture on the left. It advertises the batteries differently: ‘REFILL WITH No.55 USA LITE LOK-TOP BATTERIES’. It’s unclear to me if this version dates from before or after the version with the black cap that doesn’t refer to No.55 and Lok-Top.
A curiosity I recently came across on eBay is this TL-122-A by Eveready, identical to military types, but this one is marked ‘Official Flashlight Boyscouts of America’, and the ‘Be Prepared’ crest where you would have the TL-122-A designation. Like the military types, it was painted green. That’s all I know about it.


Bob Young sent me these pictures. The first would be the first version of the military angle head flashlight. The second is the same as the ones above, but marked Eveready instead of TL-122-A:




Similarly, in February 2020, Jaime Abreu sent me these photos of a USA LITE crookneck flashlight that doesn’t have the TL-122-A markings, but instead have the USA LITE on both sides where you would have the TL-122-A designation. According to the gentleman he bought it from: “This is one the earliest, if not THE EARLIEST, Brass-bodied Flashlights supplied to the USMC and the Army, designated TL-122-A by both USA LITE and EVEREADY. This is NOT an example made for the civilian market or a post-war production, but one of the first QMC Contracts that USA LITE rushed out before the model number ‘TL-122-A’ was required to be moulded into the cast alloy Angle-Head.” It’s the first I heard about this, but I am inclined to go along with the idea that the branded versions pre-dated the TL-122-A marked bodies. Indeed, they would have required a different die to press them. If anyone has any evidence or stories to confirm or deny this, you are welcome.
The TL-122-A is the only type of angle-head flashlight listed in my copy of the U.S. Military Forces Supply Catalog, dated 15 January 1945. It is listed with the following details:
Service: 7 (that means Signal Corps)
Stock or Model No.: 6Z4002A-1
Item: Flashlight TL122A (Pre-focused, right-angle, spotlight type; 2 cell)
Unit: each
Price $ .62
The catalog also list the following accessories:
Service: 7
Stock or Model No.: 3A30
Item: Battery, BA 30 (f/Flashlight TL L122A)
Unit: each
Price: $ .10
Service: 7
Stock or Model No.: 6Z6761A
Item: Lamp LM 35-A (f/Flashlight TL 122A)
Unit: each
Price: $ .10
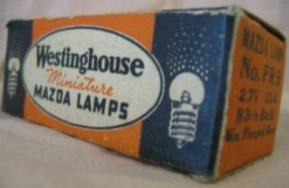
You sometimes see spare bulbs offered on eBay, reportedly for the TL-122 flashlight, but I think they could have been intended for any other purpose (bicycle, instrument lights…). Here are some pics I found. The GE-Mazda box is dated 1944, but I see no reference to the official item name and stock or model number.

As the glass lenses broke easily, spare lenses were available. They came packed in cardboard boxes with 20 lenses each. However, these lenses are not list in my Supply Catalog.

Finally, a word on the TL-122-A replica available from What Price Glory. They sell a copy that looks just about perfect. Fortunately we can still distinguish it from an original. Like all WPG items, it’s marked as such, so it can’t be sold as an original. Other than that there are only two very small differnces. Firstly the missing oval hole in the belt clip, and secondly the copper rivets on the switch unit, which should be of brass or iron, as in the photograph on the right.




TL-122-B
This is the second ‘crookneck’-type model and the first one made of OD green plastic. Another difference is that it has a spare bulb inside the battery cover. It still has a glass lense, but it doesn’t seem as prone to breaking as in its predecessor. This one here came from a whole box of flashlights that had tank gearbox grease poured over them years ago when they were put into storage. This one came out quite nicely, but many had very rusty belt clips and buttons. Still, it’s the biggest heap op vintage flashlights I have ever seen (photo courtesy of Kenneth Lewis).

The one on the left in the photograph below is marked ‘USA LITE’ and ‘United States Electric MFG. Corp. New York’ at the bottom of the battery cover. The TL-122-B is more easily found than an A or a C, and is usually less expensive. There is also a version with a different design of switch, as can be seen in the photograph on the left.



Ken Lewis (who also sent the picture of the transparent model below) sent me these pictures of a TL-122-B with a plastic switch. I had never seen one like that before. On the battery cap you can see they call it a ballbearing switch.


These photos were sent to me by Benjamin Wachter. It’s a TL-122-B, but marked “TL 122B Fr” and no manufacturer markings. I have no explanation for the absence of the dashes in the name or the “Fr” designation. Maybe it stands for France or French? Otherwise it looks identical to my own TL-122-B.


The TL-122B also exists with a GITS-marked battery cover. I didn’t have any photos of it, but Joseph Deak was so kind to share a this picture with me, as did Charlaine Nordin right about the same time, coincidentally. So thank you both!

What Price Glory also sells a copy of the B. It is also well made and can be recognized as a copy by the style of the sliding switch and the way the switch unit is attached to ther body (with phillips-head screws instead of rivets).




Heres’ another TL-122-B, but with a Bright Star brand on the battery cap. It was sent to my by Greg Quays. His father got it in WWII. He was in the Australian Army in New Guinea ’43-45 and the Australian troops got a bottle of beer in their rations. His father swapped his beer for this flashlight with a GI he met. It still works OK and gets used from time to time.

TL-122-C
The C is virtually identical to the B, but there are some differences other than the text TL-122-C on the angle head. The lense is still made of glass, but it is swaged between rubber and fibre rings. The battery cover has a slightly different pattern and also has an added fibre washer for waterproofing. The switch is identical to the TL-122-B, but the switch unit is no longer directly riveted directly onto the body, but onto a brass plate and a rubber ring. Inside (not visible on the photograph), the rivet holes are also sealed by fibre washers. This flashlight is marked ‘GITS’ and ‘Made in U.S.A.’ at the bottom of the battery cap. Many of the Cs are covered with some kind of white product. You can see some of its residue on the photograph. This is not dirt and you shouldn’t clean it off if you ever find one like that.



Although more recent, the C is now less commonly found than the B, and more sought-after, so more expensive. As far as I know, there are no copies of the C.
Apparently, not only the TL-122-B, but also the TL-122-C was made with a plastic switch. These pictures are from Paul Reijnders. Curiously, it bears no maker’s marks, just its owner’s name carved into the battery cap.



Here are two C’s, made by USALITE. Both are stone mint and in their original cartons. The left one is mine, and the other was sent to me by Ken Lewis. Curiously, my box is marked TL-122-C, but the flashlight is just marked USALITE, where you would normally find the TL-122 nomenclature. Ken’s box looks like a commercial version, yet his flashlight is properly marked TL-122-C.



 In May 2015, Nick Moss sent me this photo of a TL-122-C. “Whilst searching in rock pools with my son today at St Margarets Bay, on the Kent coast, close to Dover (UK) we discovered buried in the sand in a pool a USA Lite TL-122-C flashlight. Just googled it and discovered the link to your site. Amazing!”. Imagine this flashlight belonged to a GI over 70 years ago!
In May 2015, Nick Moss sent me this photo of a TL-122-C. “Whilst searching in rock pools with my son today at St Margarets Bay, on the Kent coast, close to Dover (UK) we discovered buried in the sand in a pool a USA Lite TL-122-C flashlight. Just googled it and discovered the link to your site. Amazing!”. Imagine this flashlight belonged to a GI over 70 years ago!
Samuel Birdsell sent me pictures of his TL-122-C in August 2021. It’s the first one I have seen with a Bright Star branded battery cap. The flashlight looks all original, except for the phillips head screws holding the switch. As can be seen in all of the other photos of the various models, the switch was always attached with rivets, except for the replica from WPG below. But this flashlight looks otherwise orginal, so it was probably refurbished after the war. As far as I know, the Phillips head screw had already been invented and even commercialized before the war, but non were used during the war (looking at radios and other WWII equipment).


TL-122-D
The TL-122-D was the last of the wartime manufactured flashlights, but there is no photographic evidence of its actual use by American forces. However, it was re-issued to the French after the war and examples of this type are still available quite easily and in good condition. This one is marked ‘Niagara’ on the side. The main change was the addition of a container for spare filters, screwed onto the battery cap. It also had two lense rings. One keeping the now plastic transparent lense in front of the bulb, and another one for easily changing filters.


Minefield Marking Chest with TL-122-C flashlights
In October 2021, Thorsten Becker sent me photos of this minefield marking chest he found. It’s dated 29 September 1944, and it’s in great shape and it still has the packing list on the inside:

200 batteries (compartment B)
42 flashlights TL-122-C (compartment C)
40 flashlights TL-122-C (compartment A)
164 bulbs (one in head and one in base) 2 in each flashlight
34 filters, amber for flashlights, in flashlight
48 filters, green for flashlights, in flashlight
This case was empty, but imagine finding a full one with 82 flashlights…
TL-122 transparent ‘instruction’ model
This one here’s was sent to me by Ken Lewis (‘Doughboy to GI’). Never seen one like that before. He is not certain what it was for. A pure guess work on it is a Quartermasters instructional item so that you can see the workings. The reason he thinks this, is that he has seen a low ankle brown boot that has a toe cap in the same material in order to show the steel toe cap inside, and this was a quartermasters records item.
![]()
L122
In August 2021, Dirk Beermann sent me these pictures of a flashlight with a brass body that looks very much like a TL-122-A, but it’s marked L122. It does not have any manufacturer marking on the battery cap. Another aspect that stands out are the hollow rivets to attach the switch to the body.


Unmarked versions
Again from Paul Reijnders, this one looks like a TL-122-B or C, but bears no TL-type designation. Also the type of switch is different from all other flashlights you see here. The right hand side and the battery cap are marked ‘Bright Star’. This company also made TL-marked flashlights. As this one is unmarked, I am guessing it may be a version for the civilian market.



Unmarked zinc – aluminum body
In February 2021, Dion Ruppert from Germany sent me these photos of a very special variation of the TL-122 flashlight that I had never seen before. At first sight, it looks like a TL-122-B or C, but it is not made of plastic. The whole body is made from a zinc-aluminum alloy (zamac) that looks like it was green anodized.
There are no markings anywhere. It has a spare bulb in the battery cover. It also looks like the actual switch has had the rivets removed and replaced with screws.
-
- Zinc-aluminum body, right side

-
- Front view

-
- Unmarked left side and switch

-
- Zinc-aluminum battery cap

German made flashlight
Then one below is another one from Paul. It has the crookneck shape, it’s green and looks old enough, but otherwise can’t be identified as a military issue flashlight. But then again, it may be. Given the all-metal construction, I would have pre-dated it to the TL-122-B and C. The lense cap is identical to the TL-122-A. The switch is of yet a different design. The clip is different in that it doesn’t have a simple round hole, but a shaped hole to easily hang it on a nail (I guess). Finally, there’s the manufacturer’s monogram on the battery cap. I am not entirely sure what letters it’s made up of. It looks like B S, so would that make that a ‘Bright Star’as well? Seems logical, but why is the logo on this one different from the other one?
Then in January 2021, Bastian Stieler sent a comment, saying the marking on the batter cap is actually PS, and it’s aGerman made one. These a post war contracts made by the “Metallwarenfabrik Peter Schlesinger” located in Offenbach am Main (near Frankfurt am Main). Under the brand Hassia they already produced flashlights for the Wehrmacht.



Shortly afterwards, Bastian also sent me these pictures of a Peter Schlesinger TL-122 postwar copy in NOS condition, with its original box:
Peter Schlesinger post-war German TL-122 copy
![]() Jeff Ruch sent me photos of this peculiar variation of the TL-122-A. It looks like it has been assembled from parts of different types of TL-122 flashlights. From the chrome plated switch, I would guess it was refurbished for the civilian market.
Jeff Ruch sent me photos of this peculiar variation of the TL-122-A. It looks like it has been assembled from parts of different types of TL-122 flashlights. From the chrome plated switch, I would guess it was refurbished for the civilian market.
As for the battery cover, I think the black paint has worn off. It came off easily and TL-122-As with the original black paint on them are rare. Apart from the color, it looks just like the cover in one of the photos in my article.
Interestingly, the parts of this mix and match flashlight do fit together, and it actually still works.
Photos of this smooth-bodied unmarked TL-122 shaped flashlight were sent to me by Éric Lagache. He bought it at a flee market in the Norh of France. The body is made of brass and the neck of aluminum. He has annotated the parts for us (in French):


Post war types
As mentioned before, the crookneck-type flashlight continued to be manufactured after the war and is still in use today with the armed forces worldwide. Manufacturing was not limited to the U.S.A. and similar Chinese commercial varieties are very common. Suffice to say here that if it’s not marked TL-122-something, you don’t want it for your WWII collection.

British and Italian TL-122 flashlights
In June 2017, Tony Fitzgibbon sent me this picture of two TL-122 style torches I hadn’t seen before.
One is an RAF torch marked 5a/ 9105033 with a Broad arrow and the other is an Italian Pagani torch marked TL-122-C. You can see the Italian one has an eyelet for attaching a lanyard above the belt clip.
In the gallery below you will also find detail pictures of all the markings. Note that the British torch was actually manufactured in Britain, and the Italian one in Italy.
The British one has the broad arrow mark. G.E.C. stands for General Electric Company. It is their post-1921 logo, but I can’t say this makes it a WW2 issue flashlight for sure.
The Italian one seems to be of late- or post-war manufacture, due to the TL-122-C marking and the added refinements which may be an Italian trait, but certainly don’t point to wartime standards. Fratelli Pagani Spa. in Milan used to be a battery factory that also made the first electrical flashlights, or so they claim on the VELAMP website, the company’s name since 1972. After WW2 they started making flashlights for other well-known brands too.





 Pictures of another G.E.C. marked British made TL-122-C flashlight were sent to me by Zali Mn. The battery cap is identical to the one above, but the switch is different, and so is the writing on the side. Instead of TL-122-C, there’s a long number along the circumference of the circle: 6230-99-910-5033. I don’t know what it stands for.
Pictures of another G.E.C. marked British made TL-122-C flashlight were sent to me by Zali Mn. The battery cap is identical to the one above, but the switch is different, and so is the writing on the side. Instead of TL-122-C, there’s a long number along the circumference of the circle: 6230-99-910-5033. I don’t know what it stands for.
British made TL-122 inspection light
New variations of the TL-122 keep turning up, but this one is extra special. It was also sent to me by Tony Fitzgibbon. It’s an English Shimwell Alexander torch with small inspection mirrors and fiber optic cable. It’s ex Ministry of Defence. Not sure what it was used for, but it looks very professional in its carrying case! The fiber optic cable is plugged into the adaptor mounted into the lense ring.
Click on the photo to enlarge.

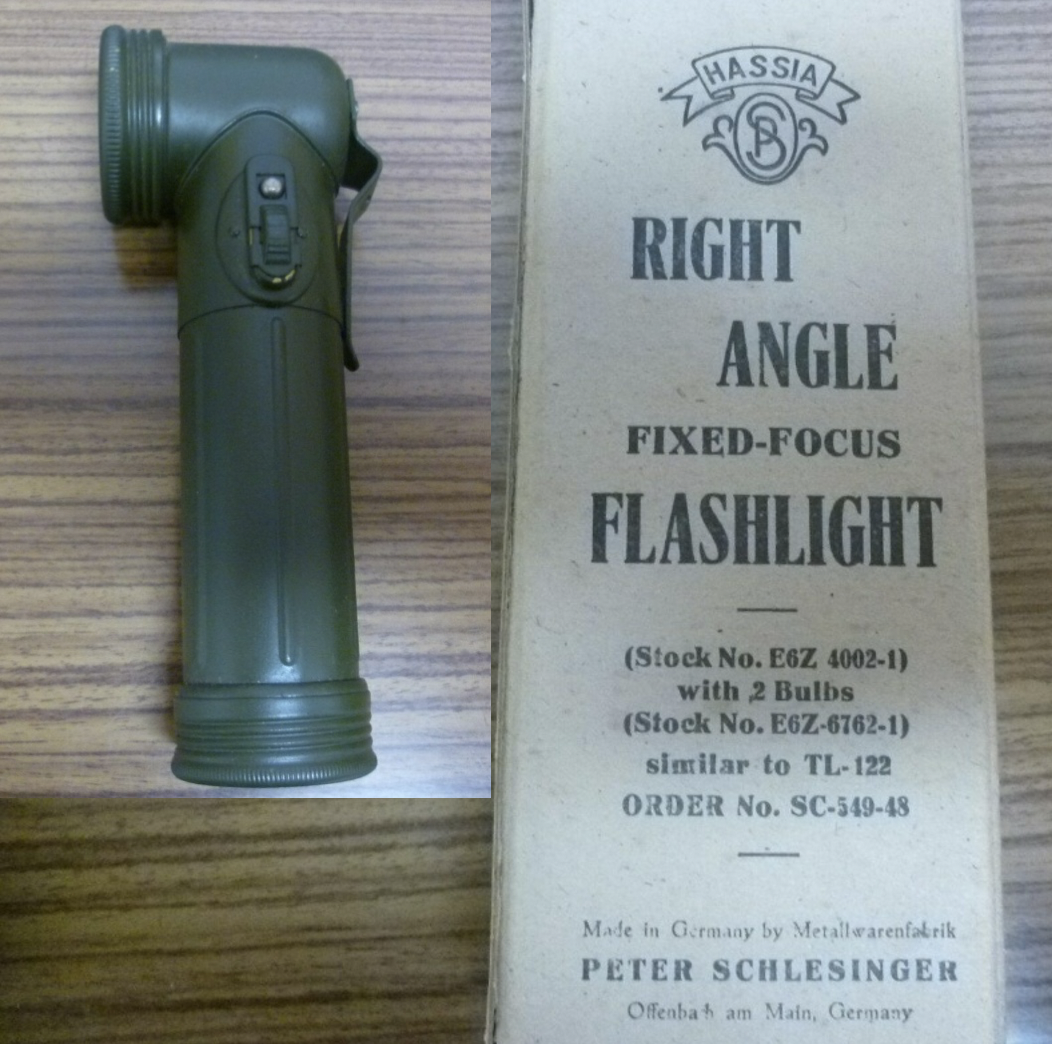
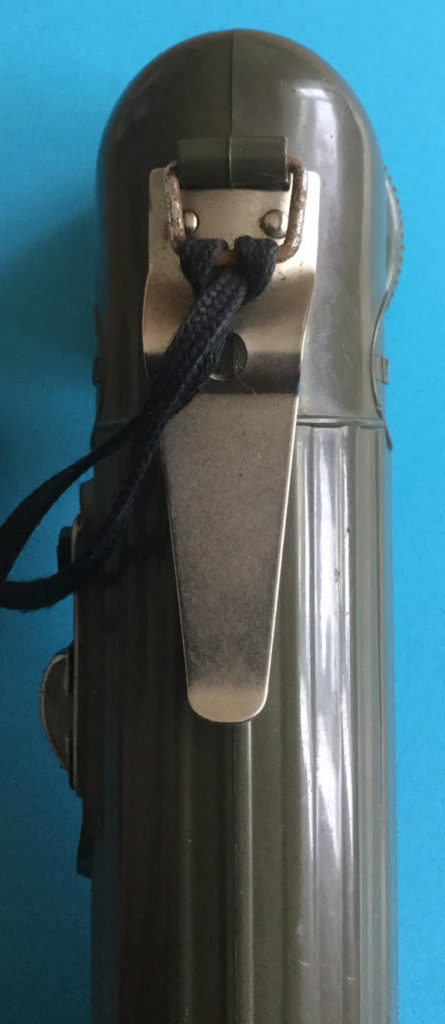
Allbright USA Flashlight This is another one that Tony sent me. I thought it was from the 1950’s, but the photos from Curt Cheeseman below made me rethink that. It is a fully OD plastic crookneck model, but the body is smooth and even the belt clip is made of plastic. Hardly seems durable, but probably cheaper that way. The on/off switch and the morse-key are separate black plastic buttons at the top of the neck instead of on the side of the body. There’s no battery cap at the bottom. You need to unscrew the neck to replace the batteries.
This is another one that Tony sent me. I thought it was from the 1950’s, but the photos from Curt Cheeseman below made me rethink that. It is a fully OD plastic crookneck model, but the body is smooth and even the belt clip is made of plastic. Hardly seems durable, but probably cheaper that way. The on/off switch and the morse-key are separate black plastic buttons at the top of the neck instead of on the side of the body. There’s no battery cap at the bottom. You need to unscrew the neck to replace the batteries.
Click on the photo to enlarge and more details
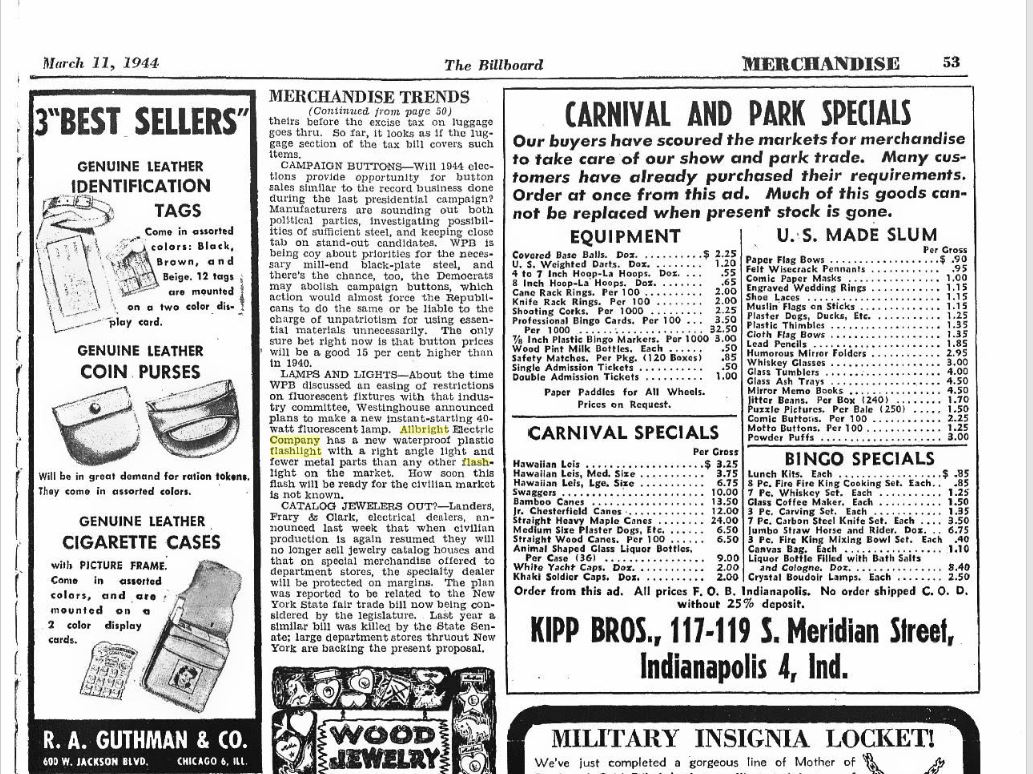
 Curt Cheeseman kindly send me this information that I would like to share here. I also updated my article about the TL-122 flashlights with it. Curt bought some items that belonged to a doctor in the 101st Airborne. Included in the trunk of items was a chestlite and an Allbright flashlight. Since the flashlight was OD, Curt made an assumption without proof that it was a military flashlight (private purchase) and left it at that. It was an early one with only Made in USA and patent pending on the bottom. Later, trying to upgrade the flashlight he came across one still in the box, but it was made a little later as it had a patent number and pending others. On the right, you see a picture of this flashlight with some Apr 1944 dated BA-30 batteries (wow!) and also a clipping from a March 1944 magazine describing the light. That is the extent of his research and he is fairly confident that it was used during WWII. I would think so too.
Curt Cheeseman kindly send me this information that I would like to share here. I also updated my article about the TL-122 flashlights with it. Curt bought some items that belonged to a doctor in the 101st Airborne. Included in the trunk of items was a chestlite and an Allbright flashlight. Since the flashlight was OD, Curt made an assumption without proof that it was a military flashlight (private purchase) and left it at that. It was an early one with only Made in USA and patent pending on the bottom. Later, trying to upgrade the flashlight he came across one still in the box, but it was made a little later as it had a patent number and pending others. On the right, you see a picture of this flashlight with some Apr 1944 dated BA-30 batteries (wow!) and also a clipping from a March 1944 magazine describing the light. That is the extent of his research and he is fairly confident that it was used during WWII. I would think so too.
 The box is really neat. Original boxes always are, but this one especially so because on the sides it shows the flashlight submersed in water for 24 hours, clip for hands free use, and a switch for signaling etc., all features that would useful in a military situation. The article also leads one to believe that it is currently (1944) in use by the military and will be available to civilians shortly or after the war.
The box is really neat. Original boxes always are, but this one especially so because on the sides it shows the flashlight submersed in water for 24 hours, clip for hands free use, and a switch for signaling etc., all features that would useful in a military situation. The article also leads one to believe that it is currently (1944) in use by the military and will be available to civilians shortly or after the war.
 David White kindly sent me a photo of a USALite brand TL-122-A, new in the original box. Absolutely stunning, and it gives as a good idea of the original paint finish. The box may be commercial, but the flashlight would have looked the same.
David White kindly sent me a photo of a USALite brand TL-122-A, new in the original box. Absolutely stunning, and it gives as a good idea of the original paint finish. The box may be commercial, but the flashlight would have looked the same.
Note that the lens cover on the box is angular, whereas the actual flashlight has a round lens cover.
Batteries
The TL-122 flashlights operated on two 1.5 Volt BA-30 dry cell batteries. Below you see a photograph of replica batteries. In Michel De Trez’ book ‘At the Point of No Return’, page 33, there’s also a photograph of a Bright Star brand angle head flashlight and its original box. Next to it is also an OD green D-cell battery. De Trez calls it a TL-22 flashlight. I don’t know if that exists, or if it’s just a mistake. You can also see the green batteries in Curt’s photo above.

Coloured filters
On the same page, De Trez also speaks of coloured filters used for assembly purposes. The red filter was for 1st Battalion, white for 2nd Battalion, and blue for 3rd Battalion. That leaves me with two questions. One: where did they keep the spare filters? Models preceding the TL-122-D did not have a compartment for filters in the battery cap and I didn’t find any filters in any of the A, B or C lights I have ever seen. As all period photographs are in black and white, this is hard to verify, but I have seen current photographs with green lenses installed. Which leads me to the other question: what other colours were used, and for what?
Credits
Thanks to Henri Van Meel, Paul Reijnders and Kenneth Lewis for photographs of their collections.
The Flashlight Museum
I discovered Dave McLellan’s website while working on the April 2008 update. He runs the Flashlight Museum. His collection also includes military flashlight, and he has a page with links to site of other flashlight collectors.
You can contribute too:
This article describes the variety of TL-122 flashlights and accessories that I know of. You are welcome to contribute with any additional information that you may have.

real nice pics! how hard is it to get ww2 flash lights? I just got a tl-122-c and It is in roughshape. My brother is a ww1 and WW2 collector and Im going to give to him.
You have to wait until they come up for sale somewhere. The TL-122-C is the most common, so it should be possible to find a decent example. The TL-122-A’s are rare, but can still be found. Most are missing a lot of paint. In nice shape, these can fetch over 100 euros…
I have not seen a TL-122-C with a colored filter as you have indicated; however, I noticed on the box that it indicates in comes with a filter M-384. The filters I have with my -D flashlight as well as the one pictured above come with M-384 filters, so maybe Mr. De Trez is on to something. Regards
I am the owner of a TL-122 (the side says “TL-122”, nothing else) flashlight. I would include a photo, but I can’t use my camera. I bought it for $5 at a pawn shop. It came with 4 filters: 1 nearly translucent and white, one yellow, one red, and one blue. They were kept in a compartment on the bottom of the flashlight, as shown above. Also, flanking the power switch, are two plastic walls that I believe are to prevent accidental powering on of the flashlight. I have also seen similar models with very strong magnets atop these plastic walls.
Hi John,
Sounds like a post-war if it has the filter compartment and the plastic walls alongside the switch. But I only know of the TL-122-D. This could be an interesting variation. If you ever get a chance to take a picture of it, or someone who can do it for you, please send it on and I will add it.
Regards,
Wouter
I have tl 122 D
I think I have the same that John has. Only writing I found is TL-122 in a circle. It has plastic body, a spare bulb and 4 filters (yellow, green, blue and red). Also a holder in the bottom so you can hang it somewhere.
Just bought one just like yours, John for the same price. I believe it is Canadian post war. I remember using these in the 70’s when I did some training with the Canadian military as a student. Mine is missing the clear diffusing filter, but it has the red, green, yellow, and blue filters.
I have a tl122b with the gts battery door ingest picked up today would be happy to send a photo of you can tell me where to send it.
I have tried to research this on Google, but they are only interested in promoting their sellers’ stuff, so drew a blank: I can remember reading as a boy in the sixties that the flashlight is called a “Torch” in the British army because of the WW2 supplies part number “TOC-C” obviously this isn’t true and is supposedly forces humour. Torch is a very old word predating the electric flashlight by centuries.
But, does anyone have a reference for the above?
Would you like to add a photo of some actual BA-30 batteries? If so email me a note and I’ll send a picture or two. Thanks for the great web site.
Regards,
Curt
I just recently got ahold of the same light as John I have modern versions of these lights but they all say mx-991/u on them. But there is many differences such as all plastic buttons on the switch while the new ones are metal and the old on has screws holding on the switch and the new are ribboted if you email me I can send u pictures of all of them I would really like to know as much as possible about this please contact me at mct95@live.com
Sure, send them on, but I am not much of a specialist on the post-war types. MX-991/u is Vietnam-current issue. I could keep adding post-war varieties, such as a new version with LED’s. Surely, the batteries will last much longer.

I have one of the older LT-122s in black. It is slightly longer then a MX-199/U by 1/4″
Hello Johnny, thanks for sharing that. Does the additional length come from the battery cap / filter holder? Or is the battery compartment itself longer?
I have a TL-122-C with a plastic lens kind of yellowish is that original to the TL-122-C or would it have been glass? Second the lens cap has a small space or gap between where it screws on to the angeled head, is there an “O” ring missing?
Thanks Great site!
Hello Ryan,
The gap is from adding the colour filter. If you remove that, you will see the fit is better. These filters were plastic (acetate) in the war, not glass. The clear lenses were made of glass though.
I think the switch has been repaired, because they are always riveted. That’s the case on all types.
I hope this helps.
hi there wouter i have the TL-122-A i heard it was rare
It has missing paint but its in good shape i would like to send a picture but not sure how
you can e-mail your photos to paratrooper.be@gmail.com
my torch is the EVEREADY
Hi:
I collect dynamo flashlights and I have some very nice WWI and WWII. Do you have any picture showing soldiers using them? Such a picture will show very nice in my collection.
thanks, Vladimir
No, I don’t have a photo like that. But I can keep an eye out for you. I’ll let you know when I come across one.
I have a TL122 flashlight. It has three lens, clear, yellow and red. The designation _ TL122 – runs lengthwise where most of the a,b and c versions are across the flashlight. It has a black metal clip and a black metal switch. The switch is guarded by raised plastic on either side. Can you date this for me? Thanks
I don’t think I have seen one with the marking in the other direction, but from your description, I’m sure it’s a post-war flashlight.
I’ve been going thru my treasures. What I have is marked TL-122B, but , it has a -C Bottom. Is this a frankenweenie? And what goes in the bottom cap? Is there supposed to be a spring to make contact with the brass along the side? I think that part may be broken as it dosent go upto or over the D cells. Oh, has glass lens.
Hi! Yes, it sounds like an assembled one from parts. You do need a spring in the battery cover. You can replace it with a modern spring from another flashlight using D-cells, although the wire used in wartime springs was thinner. But that’s inside – no one will notice.
I have a taesung flashlight DT 109/S simular to TL 122, and my question was if you have a on/off switch for sale!
My switch is a bit worn out !
Grettings pieter van iperenburg
No sorry, I don’t have any spares. I hope you find one!
Hey there! Do you know what each of the different colored lenses do?
Hi Sydney, I know red was used for map reading in the dark, so as to minimize loss of night vision. Somewhere I read that different colors were also used for different units, but for the life of me, I can’t remember where I read this.
Hi
First of all thank you for setting up such a fantastic website, I am having great fun browsing all this interesting info BUT I also would very much like to find a bit more about the particular TL 122 A made by NIAGARA as I have just found/bought one today on a Doncaster Flea Market, South Yorkshire, England.
I was wondering if you had any idea of numbers made by Niagara and just how rare they are, any ideas on value of a paint worn yet fully working version (like mine) sorry to mention value but that can often give a better indication to rareity as well..
I look forward to your reply.
Best Regards & Keep up the Good Work.
Sime.
Hello Sime, I think the Niagara TL-122’s (as pictured in my article) are more rare than the others, but I don’t believe they are more valuable. I have been getting a number of questions lately about TL-122-A’s with most of the paint gone and what they’d be worth. From what I can tell from years of auctions and sales, the ones with more than half of the paint finish gone are worth $30-$70, and the ones with a lot of paint around $100-$125, depending on how nice they look overall, although actual asking prices will vary across the range. I have never actually seen a brand new TL-122-A, but I have seen repainted ones. They always look awful. Hope this helps. Grtz, Wouter
Hello, I have a TL-122-A flashlight, right angle. It is in very good shape but no batteries so I can not tell if it is working. The end cap has Refill with no.55 USA Lite lok-top batteries. the words USA Lite in the middle. then made in U.S.A. U.S. Electric MFG. Corp. There is one small dent in the battery cap other than that the light is in wonderful shape, appears to be all brass so it does look old for sure. lens is not broken or cracked and is glass. A friend is offering to sell this to me but I do not know what would be a fair price for both him and me. Can someone tell me what I have here?? Thanks Kent
HI, Like Pieter I also have a dt-109/s flashlight. What period are these from? And which country used them?
Thanks,
Brett
Hi Brett, those are Vietnam-era issue.
I have a flashlight similar to your BRIGHT STAR picture. Mine differs in that it is marked as a TL-122-B my switch is also smoother than the one pictured in this article. I was wondering if since mine has the TL-122-B marking if it was possibly issued in the military?
Hi Shawn, your TL-122-B is a military issue, no doubt. I guess just another variant. If you have pictures you can send me, I can add them to the overview.
Wouter
Hello. What is your opinion about the L 122 flashlight ? I own one and I have seen only a few of them in many years of collecting military equipment. They look very much like the TL 122 A, and are painted in an olive shade. Are they prototypes ? Civilian types ?
Hello, can you send me a picture? I don’t think I’ve ever seen an L-122. Regards, Wouter
The L122 flashlights are French post war copies. They are from the 50s. What’s weird about them is the fact that they are made from metal and not plastic like other French signal corps TL122 flashlights.
My dad would like to make his TL-122-B operational again. It needs a new lens and bulb. How does it convert to parts now. The TL-122-B was issued by the Navy, when he was drafted for WWII. He was assigned as a paint and chipper on the LST 534. Any advice you could give me is greatly appreciated!! Thanks Lori Brooks and Luther Curtis Lyles S2c
Hello Luther, maybe you still have a spare bicycle light bulb? Those will fit. If not, original spare bulbs can still be found on eBay: http://ebay.to/1EkxquB
Luther, I just saw these TL-122 spare bulbs for sale on eBay: http://www.benl.ebay.be/itm/351202232856?ssPageName=STRK:MEWAX:IT&_trksid=p3984.m1438.l2649
Ive only just purchased bulbs on ebay foe £2.89 for 2.
Thanks for the information. I have one of the B models. The battery cap is very tough to get off and then back on again. The bulb cap is fine. I’d love to see if it works after all these years. I can only assume that it was my Dad’s. He was in the Canadian Army attached to the 8th Army Field Regiment. With his stuff and my various other relatives (they were in WW1), I’ve got a decent collection. If you want pics of anything, let me know.
Thanks for your comment. Yes, I’m curious to see some photos.
Anyone know where i can get a bulb holder for the tl 122b i have. Desperate !!
I have a brass to-122-a flashlight and was wondering how much I could get for it
Sorry I ment a brass tl122a
Hello, the value depends on the condition it’s in. If it still has most of the original OD green paint and no damage, it could be worth about €125.
hello, i have a GEC England made, absolutely similar to TL-122B; what years could be used?
thank you
I don’t know about the exact years, but I do think it must be war-time made, and more towards the end of the war. 1944-45.
thank you for info.
I have a right angle light it has TL-122 in a cercle butt it’s all plastic and it has 3 lenses blue,red,green
Bonjour ,je recherche lampe t l 122 a b ou c merci de faire offre
Pingback:Bug Out Gun Lights Part 1 - Survive US
I have something that looks exactly like these on this page.
Although mine state the figures DT-109/S anyone have any ideas?
Hello Kerry, yours is a Vietnam-era flashlight.
Could you identify the lite I have if I send you pictures cheers
Sure, send me some photos at paratrooper.be@gmail.com
There is much good information here; probably the best single source on the subject. I do have to disagree with the “torch light” nomenclature though. Few people in the U.S. call a flashlight “a torch”. War Dept Tech Bulletin “SIG 120” dated 14 Nov 1944, refers to flashlight TL-122, plus flashlight models A through D, but does not once call it a torch. It consistently uses “flashlight”. With the flash button on the switch, flashlights could be used for signalling in addition to general lighting. As such, they likely received a tool designation like other tools used by the Signal Corps. Of course other groups used them too, but they likely began original issue as signal equipment. Thanks.
Hi there, thanks for this insight! Very helpful and this makes perfect sense indeed. I will add this to the article. Regards, Wouter
Hello,
I am about to buy a TL 122 C lamp but I have the choice for two model of the USA LITE brand. One with one button for flash signals and the on/off button and the other without. Only the on/off plastic switch. Are these two versions good US Army or only the one with the little button for the Morse is good? Thank you for your help,
Nicolas.
Sorry for my speaking… I’m french lol
Hi Nico, you should get the one with the morse key. The other one is probably post-war.
Hello.
I have for selling fosco industries inc. US TOLEDO OHIO flash lite TL-122
Maeby any want buy it?
Price 120€ + packing and post to any country
Who want photo I Can senf on e-mail.
Have a nice day!!!
Thanks for the offer, but no. I have enough varieties, but I’m always interested in pictures of new ones to share on this page.
Why i dont see anyone talking about this angle head flash light? Or see article on this. I have one, it is from my deceased
Brother in law.
Hi there, i have one also it came from my deceased brother in law who is in army in the philippines,im searching about it why i cant find anything about fosco making this angle head flashlight?
Hello Jack, I haven’t come across that brand. Any information I find or receive is added to this article. Except for post-war flashlights. But maybe someone who sees this comment wil know more. Regards, Wouter
Pingback:How this flashlight became the most enduring piece of military tech | We Are The Mighty
Hi there i have a TL122D Fr, what does the two flags with “T” on them stand for?
If you can send me photos of it, I can have a look. I’m not familiar with this version. It would be interesting to add this.
It stands for “Transmissions” which means Signal Corps in French.
bonjour,
modele de l armée française.celle ci font partie du materiel de transmission d’ou le t.
cordialement
The Allbright Streamliner you have pictured was actually developed in early 1944 the best I can tell. I was able to obtain one that was in a WWII trunk with other service related items.
I have in my possession a TL-122-B. USA LITE UNITED STATES ELECTRIC. MFG CORP NEW YORK. Can you tell me where the batteries are installed at on the unit? I can remove the bulb cover but can’t find how/where to install batteries. Thank you. Diane
Hello Diane, if there’s no battery cover to unscrew at the bottom, you can try to twist the neck, in order to insert the batteries from the top.
I love the military angled head military torches but can someone answer my question. The British army torch hasn’t got a extra filter housing for easier change like the newer torches. So how do you change the filters. Do you install in front of the bulb in other words remove the standard clear glass or do you simply unscrew the bulb housing put the wanted filter in front of the clear glass and screw the housing back on. Can’t find any instructions for this and I’m totally quizzed. The TL-122 torch used in Vietnam by the US army was the same set up as the British army torch now. Can anyone give me the answer. Please please help!!!!!! Send me a email by all means direct!!!!!
Fascinating story; great website I have got an OT-109/S flashlight which looks like a TL-122.It has a base compartment which contains a spare bulb, a red filter and a sealed pack of matches with striker. What is the origins of this one?
Hi Hugh, I would think this type is also post-war, because the wartime models were all called TL-122 something, and they did not have a compartment for a spare bulb and filters.
I found a tl 122 b on my torrent in Italy eith an added part to contain a third battery type D.
That’s interesting. Can you send a photo of it?
I’m happy to send you a photo of the GTS logo battery door please let me know. I just scored the tl122b this weekend
Hi Nathalie, could you send the photo to paratrooper.be@gmail.com? Thanks
Pingback:Bug Out Gun Lights: Part 1 - SHTF blog – Modern Survival
Hi I wonder if upon can help please? Who I was a kid in the 60s my Dad had a torch given him by an uncle in Liverpool. My thought that is was US Army sold by a serviceman in Liverpool docks for beer money. The torch was fascinated me. It had a 6V 4R25 battery, a wire stand, and clear plastic screw on cover over the bulb and lens and khaki green. With the large clear bulbous lens on the front, I always thought it looked like a Huey helicopter. But this is the bit that was fascinating, it had two bulbs and switch on the top to move them left and right. So when a bulb failed, you just slid the other into place with the switch on top!
Do you know anything about this time of lamp? I’ve been looking to find one for years, any help would be greatly appreciated.
Thanks in advance.
Regards
Will
Hi Will, would it be possible to send me a photo? I can’t quite make out from your description what kind of torch you mean. Kind regards, Wouter
I may add a few elements on the French TL-122B. They have been introduced at the end of the 1960 and were very similar to their American counterparts. They were made by Mazda a French brand which was associated with Eveready from the US. They have no markings except two crossed flags with T on and the mention TL122B Fr which stands for France. The switch was fixed on the body by screws instead of rivets and the flashing dot was on the bottom of the switch instead of being on the top. As far as quality was concerned, they were quite close to their American counterparts. They were replaced at the end of the 1970s by a TL122 D model which stopped being produced at the beginning of the 1990. The quality of these TL122 D Fr was not as good as their American equivalent. The plastic on the body was thinner hence more fragile. They did not have any protection on the switch like the most recent American ones. The switch was fixed with screws, not rivets. They did not have any markings except the crossed flags and the TL122 D Fr mention.
They had three filters, a red, a blue and a white black-out one. The main difference with the American model was that they did not have a metal loop at the bottom. Instead, the bottom was flat and it was written “filtres” (filters) on. If you are interested by purchasing one, there are many available, both TL122 B and TL122 D on the site “la tranchée militaire” for 10 to 12 $.
Thanks for your contribution Luc! Very interesting.
I have a TL122-D marked on the side with a T inside a Diamond. Was this made by Diamond T Trucks during WW2 Is it rare??
Thanks and have enjoyed your website.
Can you share a picuter of that Stanley? In any case, it sounds like something I haven’t seen before. Kind regards, Wouter
What about the TL-122 produced by GE of England? I have one with me..how do i send a picture?
Hello from Germany.
The TL marked BS (it’s actually PS) on the bottom of the cap is actually a German made one.
These a post war contracts made by the “Metallwarenfabrik Peter Schlesinger” located in Offenbach am Main (near Frankfurt am Main). Under the brand Hassia they already produced flashlights for the Wehrmacht.
How about that! Thanks for sharing this Bastian! These photos must have been here for over a decade. Nobody ever came forward with more information, and now you do. That’s very interesting, and I had never hear about this. I will update the article and do a post on it.
Pingback:The Military Flashlight — It Dates Back to the First World War
Have 2 of them ,a MX-99/U and a TL 122,they both don`twork and i don`know how to fix them
has somebody advice how to bring them back to work?
Hallo Heinz, you are in good company: many of these crookneck type flashlights no longer work, even after swapping the bulb and batteries (I’m sure you already tried that). This goes for wartime as well as post-war and modern version. Apparently, it was an unreliable design. This didn’t keep countries around the world from manufacturing them until the end of the 20th century. Generally, the switch was riveted to the body, so it will be difficult to take it apart without damaging the flashlight. The contacts inside aren’t wires, but flat rods. Maybe it’s an oxydation problem that occurs only after years. I don’t know.
Thank you.
I recently aquired a Tl-122A model with the brand name USA LITE instead of the model number, and it came from a man who was a paratrooper in the 40’s part of his kit. Not sure if that is at all supportive of the claims made by the one you found, but I hope that helps.
the Flashlight is still fully functional and had the carboard branding to the original USA LITE batteries inside it, as well as two brandings for burgess batteries that have an expiration date of 1946.
Hi James, it would be great if you could send pictures of the batteries: paratrooper.be@gmail.com. Best regards, Wouter
I was just reading this article out of curiosity. My dad passed last year at age 58, he used to have a decommissioned Pineapple Grenade Mk2, I believe, and also one of the post-war era TL-122 flashlights I played with A LOT as a kid growing up in the 1990’s.
He must have sold them or got rid of them over the years (sometime after 2004 because I remember him still having them around the house while I was in high school), and I’ve been looking for replacements ever since.
It is hard to find these items because surplus stores online seem to sell the fake plastic items half of the time, and other military surplus stores in-person do not have them in stock ever.
I will keep an eye out though, this is a handy guide for the older style flashlights if I ever see them in-person. It is difficult finding specific items out there, despite it seeming like there should be tons and tons of them in the wild.
Hello Chris, I’m sorry for your loss. I hope you will find a good original Army issue flashlight yet. On eBay you should be able to find one sooner or later. Like you said, hundreds of thousands must have been made.